Mtro. Huber Girón Nieto
Departamento de Ciencias e Ingenierías | Universidad Iberoamericana Puebla, México.

Mtro. Huber Girón Nieto
Resumen:
Lorem ipsum dolor sit amet consectetur adipisicing elit. Iusto est, ut esse a labore aliquam beatae expedita. Blanditiis impedit numquam libero molestiae et fugit cupiditate, quibusdam expedita, maiores eaque quisquam. Lorem ipsum dolor sit amet consectetur adipisicing elit. Iusto est, ut esse a labore aliquam beatae expedita. Blanditiis impedit numquam libero molestiae et fugit cupiditate, quibusdam expedita, maiores eaque quisquam.
Proyectos:
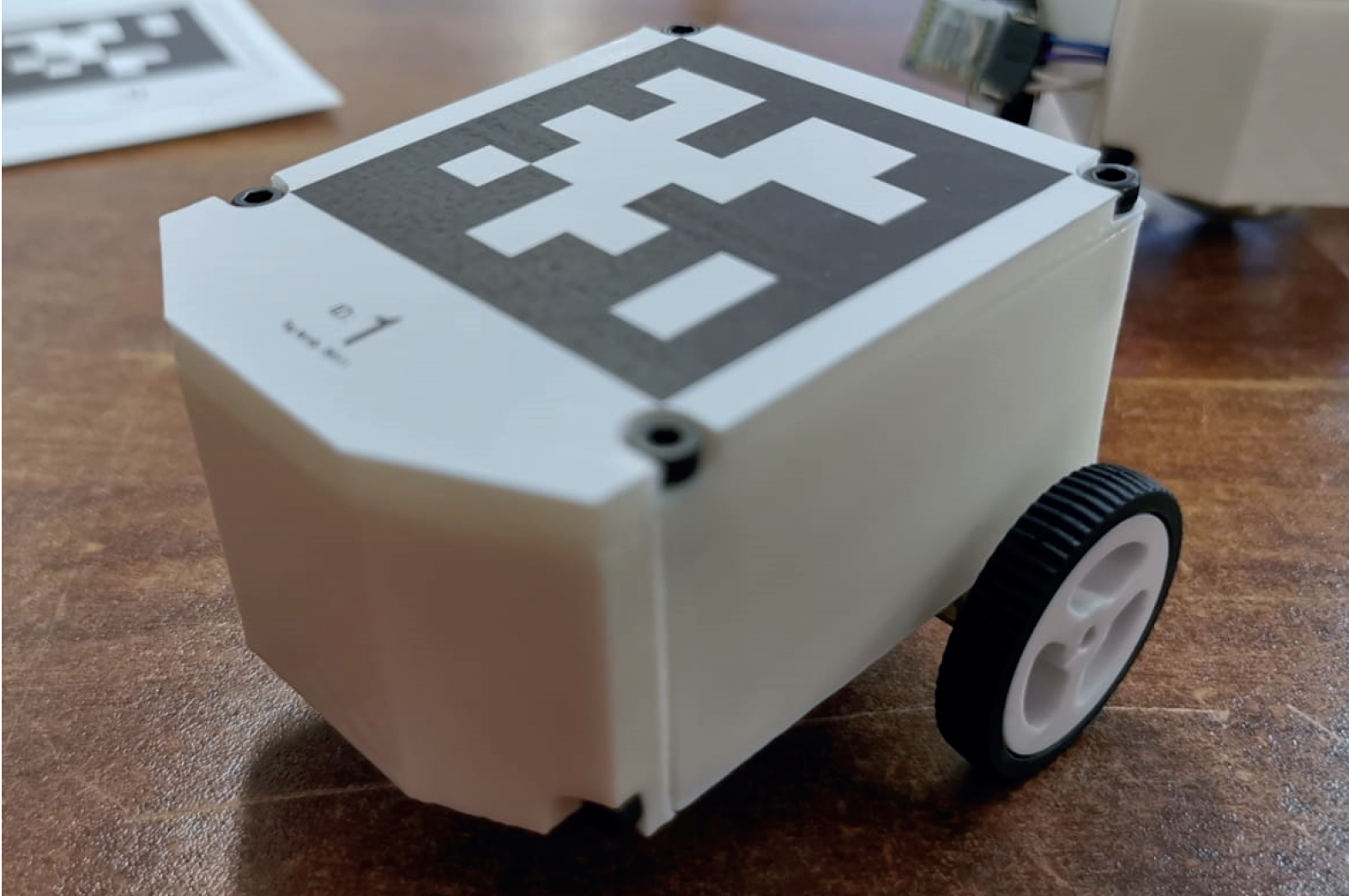
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.
Cursos:
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.

Lecciones:
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.
Coordinación de robots moviles
En este proyecto se aborda el estudio de coordinación grupal de robots móviles. Enun primer momento se enfocará en el desarrollo de un conjunto de robots móvilescon un sistema de formación basado en distancia diseñado para aplicaciones de carga en ambientes industriales y de servicio.